


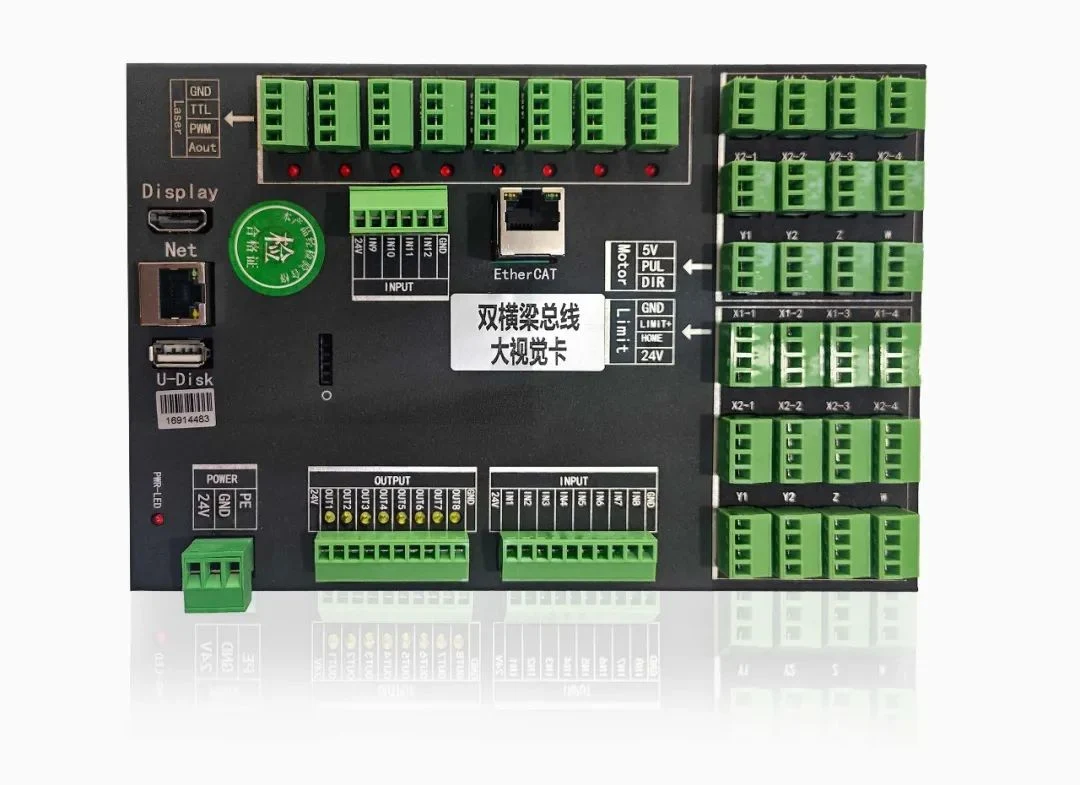
ໃນພາກສະຫນາມຂອງການຕັດ laser, ທາງເລືອກຂອງລະບົບການຄວບຄຸມໂດຍກົງຜົນກະທົບຕໍ່ຄວາມຖືກຕ້ອງ, ຄວາມຫມັ້ນຄົງແລະປະສິດທິພາບການຜະລິດຂອງອຸປະກອນ. ໃນຂະນະທີ່ການຄວບຄຸມກໍາມະຈອນແບບດັ້ງເດີມຄ່ອຍໆເປີດເຜີຍຂໍ້ບົກພ່ອງຂອງມັນ, ການຄວບຄຸມ EtherCAT ໄດ້ກາຍເປັນທາງເລືອກທໍາອິດສໍາລັບການຜະລິດຊັ້ນສູງ. ມື້ນີ້ພວກເຮົາຈະວິເຄາະລະບົບການຄວບຄຸມ EtherCAT ພັດທະນາໂດຍ Zhiyuan (Shenyan) ຈາກສີ່ມິຕິ, ເປີດເຜີຍວ່າເປັນຫຍັງການຄວບຄຸມ EtherCAT ແທນທີ່ຈະເປັນການຄວບຄຸມກໍາມະຈອນ, ແລະປຽບທຽບຄວາມແຕກຕ່າງລະຫວ່າງສອງໃນລາຍລະອຽດ!
ໃນການຄວບຄຸມກໍາມະຈອນແບບດັ້ງເດີມ, ລະບົບ gantry ຂັບສອງແມ່ນອີງໃສ່ຄວາມຖີ່ຂອງກໍາມະຈອນທີ່ກົງກັນ. ແນວໃດກໍ່ຕາມ, ຄວາມລ່າຊ້າຂອງສັນຍານແລະຄວາມແຕກຕ່າງກັນການຕອບໂຕ້ຂອງມໍເຕີມັກຈະເຮັດໃຫ້ເກີດການບິດເບືອນ beam. ໃນຄວາມໄວສູງ, ນີ້ສາມາດນໍາໄປສູ່ການເຄື່ອນໄຫວ jerky ຫຼືແມ້ກະທັ້ງການສູນເສຍຂັ້ນຕອນ. ຂໍ້ບົກຜ່ອງທີ່ສໍາຄັນກວ່ານັ້ນແມ່ນວ່າຂໍ້ມູນຕໍາແຫນ່ງມໍເຕີໄດ້ສູນເສຍໄປຫຼັງຈາກໄຟໄຫມ້, ຮຽກຮ້ອງໃຫ້ມີການໂຮມໃຫມ່ດ້ວຍມື, ເຊິ່ງໃຊ້ເວລາຫຼາຍແລະມັກຈະເກີດຄວາມຜິດພາດ.
ໃນທາງກົງກັນຂ້າມ, ການຄວບຄຸມ EtherCAT ຊ່ວຍໃຫ້ການຕອບໂຕ້ແບບສົດໆຈາກຕົວເຂົ້າລະຫັດໃນທັງສອງມໍເຕີ, ປັບການແຈກຢາຍແຮງບິດແບບເຄື່ອນໄຫວເພື່ອຮັກສາການຊິ້ງຂໍ້ມູນ. ເຖິງແມ່ນວ່າຢູ່ທີ່ຄວາມໄວຂອງ 2000 mm / s, ຄວາມຜິດພາດ synchronization ສາມາດເກັບຮັກສາໄວ້ພາຍໃນ±3μm. ຫຼັງຈາກການສູນເສຍພະລັງງານ, ລະບົບຈະດໍາເນີນການແກ້ໄຂຕໍາແຫນ່ງອັດຕະໂນມັດ, ອະນຸຍາດໃຫ້ດໍາເນີນການຄືນໃຫມ່ໄດ້ທັນທີໂດຍບໍ່ມີການແຊກແຊງຄູ່ມື. ນີ້ຢ່າງຫຼວງຫຼາຍຫຼຸດຜ່ອນຄວາມສ່ຽງຂອງສິ່ງເສດເຫຼືອຂອງວັດສະດຸເນື່ອງຈາກການສູນເສຍຂັ້ນຕອນ, ເຊິ່ງແມ່ນທົ່ວໄປກັບລະບົບກໍາມະຈອນ.

ສະພາບແວດລ້ອມແມ່ເຫຼັກໄຟຟ້າພາຍໃນຂອງເຄື່ອງຕັດເລເຊີແມ່ນມີຄວາມຊັບຊ້ອນສູງ, ເຮັດໃຫ້ຂໍ້ບົກຜ່ອງຂອງລະບົບຄວບຄຸມກໍາມະຈອນເພີ່ມຂຶ້ນປາກົດຂື້ນ:
ແຕ່ລະແກນຮຽກຮ້ອງໃຫ້ມີກໍາມະຈອນແຍກຕ່າງຫາກ, ທິດທາງ, ແລະເປີດສາຍສັນຍານ, ສົ່ງຜົນໃຫ້ມີຈໍານວນຂະຫນາດໃຫຍ່ຂອງສາຍ. ອັນນີ້ເພີ່ມຄວາມສ່ຽງຕໍ່ການເຊື່ອມສານລົບກວນໄຟຟ້າ ແລະການສູນເສຍສັນຍານກໍາມະຈອນ.
ລະບົບສາຍສົ່ງທາງໄກຕ້ອງການສາຍໄຟປ້ອງກັນເພີ່ມເຕີມ, ຄ່າໃຊ້ຈ່າຍເພີ່ມຂຶ້ນແລະຄວາມຫຍຸ້ງຍາກໃນການບໍາລຸງຮັກສາ.
ໃນທາງກົງກັນຂ້າມ, ລະບົບການຄວບຄຸມ EtherCAT ພຽງແຕ່ຕ້ອງການສາຍຄູ່ບິດທີ່ມີໄສ້ດຽວກັບ daisy-chain ອຸປະກອນທັງຫມົດ. ການຕັ້ງຄ່ານີ້ໃຫ້ປະສິດທິພາບຕ້ານການລົບກວນທີ່ພິເສດ, ຍ້ອນຄຸນສົມບັດເຊັ່ນ: ການກວດສອບຄວາມຜິດພາດ CRC ແລະກົນໄກການສົ່ງຄືນ.
ເມື່ອປຽບທຽບກັບລະບົບກໍາມະຈອນ 4 ແກນແບບດັ້ງເດີມທີ່ຕ້ອງການເຖິງ 16 ສາຍສັນຍານ, ການຄວບຄຸມ EtherCAT ຫຼຸດຜ່ອນສາຍໄຟ 90%, ເຮັດໃຫ້ເວລາປະກອບສັ້ນລົງຢ່າງຫຼວງຫຼາຍ, ອັດຕາການລົ້ມເຫຼວຫຼຸດລົງ 60%, ແລະປັບປຸງຄວາມຫມັ້ນຄົງຂອງລະບົບຢ່າງຫຼວງຫຼາຍ.

ລະບົບຄວບຄຸມກໍາມະຈອນພຽງແຕ່ສາມາດສົ່ງຄໍາສັ່ງ unidirectionally, ເຮັດໃຫ້ສະຖານະພາບມໍເຕີຢູ່ໃນ "ເຂດຕາບອດ." ການແກ້ໄຂບັນຫາແມ່ນອີງໃສ່ປະສົບການຄູ່ມືຫຼາຍ, ເຮັດໃຫ້ຄວາມສ່ຽງຕໍ່ການຢຸດເຮັດວຽກສູງ ແລະການບໍາລຸງຮັກສາບໍ່ມີປະສິດທິພາບ. ໃນທາງກົງກັນຂ້າມ, ການຄວບຄຸມ EtherCAT ຊ່ວຍໃຫ້ການສື່ສານແບບ duplex ເຕັມຮູບແບບ, ອະນຸຍາດໃຫ້ເຂົ້າເຖິງສະຖານະຂອງມໍເຕີ ແລະຕົວກໍານົດລະບົບໃນເວລາຈິງ. ມັນຮອງຮັບການຄາດເດົາຄວາມຜິດອັດສະລິຍະ ແລະການຄວບຄຸມການປັບຕົວ, ໂດຍມີຂໍ້ໄດ້ປຽບຫຼັກຕໍ່ໄປນີ້: ການບັນທຶກຂໍ້ມູນຮອບວຽນເຕັມຮູບແບບສຳລັບມໍເຕີ ແລະແກນ.
ການເຊື່ອມໂຍງຂໍ້ມູນປະຫວັດສາດທີ່ອີງໃສ່ຄລາວເພື່ອການຕິດຕາມສະພາບການເຄື່ອນໄຫວໃນທຸກເວລາໃນລະຫວ່າງການປະມວນຜົນການຟື້ນຕົວຢ່າງໄວວາຫຼັງຈາກໄຟຟ້າຢຸດ, ຫຼຸດຜ່ອນເວລາການຜະລິດຫນ້ອຍລົງ. ລະດັບຄວາມສະຫລາດນີ້ຊ່ວຍເພີ່ມຄວາມຫນ້າເຊື່ອຖືແລະຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍໃນການບໍາລຸງຮັກສາຢ່າງຫຼວງຫຼາຍ, ເຊິ່ງເປັນການຍົກລະດັບທີ່ສໍາຄັນຂອງລະບົບກໍາມະຈອນແບບເກົ່າ.
With pulse control, any parameter adjustment typically requires a machine reboot, making it difficult to support rapid switching between different materials or processing methods.
ໃນທາງກົງກັນຂ້າມ, ການຄວບຄຸມ EtherCAT ສາມາດຖືກລວມເຂົ້າກັບຫ້ອງສະຫມຸດຂະບວນການທີ່ອີງໃສ່ເມຄ, ຊ່ວຍໃຫ້ຜູ້ໃຊ້ສາມາດໂຫລດໂປຣໄຟລ໌ການຕັດທີ່ກໍານົດໄວ້ລ່ວງຫນ້າໄດ້ທັນທີດ້ວຍການຄລິກດຽວ. ອັນນີ້ຮັບປະກັນການປັບຕົວຢ່າງມີປະສິດທິພາບກັບຄວາມຕ້ອງການການຜະລິດແບບຊຸດນ້ອຍ ແລະ ປັບແຕ່ງເອງ—ຊ່ວຍເພີ່ມຄວາມຍືດຫຍຸ່ນ ແລະ ຜະລິດຕະພາບໃນຊັ້ນຮ້ານໄດ້ຢ່າງຫຼວງຫຼາຍ.

ການຄວບຄຸມ EtherCAT ເປີດໃຊ້ການຕອບສະໜອງເຕັມວົງປິດເພື່ອຄວາມຊັດເຈນທີ່ເໜືອກວ່າ .ລະບົບການຄວບຄຸມ EtherCAT ບັນລຸການຄວບຄຸມສາມຊັ້ນ—ຕຳແໜ່ງ, ຄວາມໄວ, ແລະແຮງບິດ—ຜ່ານກົນໄກການຕອບສະໜອງແບບວົງປິດເຕັມ (ຕົວເຂົ້າລະຫັດ → ໄດເວີ → ຕົວຄວບຄຸມ).
ໃນທາງກົງກັນຂ້າມ, ການຄວບຄຸມກໍາມະຈອນແມ່ນເປັນວົງເປີດຫຼືເຄິ່ງປິດ, ຮຽກຮ້ອງໃຫ້ມີໂມດູນຄໍາຕິຊົມເພີ່ມເຕີມເພື່ອປະມານການປະຕິບັດທີ່ຄ້າຍຄືກັນ. ເຄື່ອງຕັດ laser ລະດັບສູງໃນປັດຈຸບັນປະສົມປະສານການຊ້ໍາຊ້ອນຕົວເຂົ້າລະຫັດສອງຢ່າງ (ຕິດຢູ່ທັງດ້ານມໍເຕີແລະດ້ານການໂຫຼດ), ການລົບລ້າງຄວາມຜິດພາດລະບົບຕ່ອງໂສ້ສາຍສົ່ງ. ການອອກແບບຂັ້ນສູງນີ້ຮັບປະກັນຄວາມຖືກຕ້ອງຂອງການແກ້ໄຂອັດຕະໂນມັດ gantry ພາຍໃນ±1μm, ສະຫນອງຄວາມແມ່ນຍໍາພິເສດແລະຄວາມຫນ້າເຊື່ອຖືໃນຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງການ.
ການຄວບຄຸມ EtherCAT ໄດ້ກາຍເປັນຄວາມຕ້ອງການທີ່ເຄັ່ງຄັດສໍາລັບການຜະລິດລະດັບສູງ: ເຖິງແມ່ນວ່າການຄວບຄຸມກໍາມະຈອນແມ່ນຄ່າໃຊ້ຈ່າຍຕ່ໍາ, ມັນເປັນການຍາກທີ່ຈະຕອບສະຫນອງຄວາມຕ້ອງການຂອງການຜະລິດຄວາມໄວສູງ, ຄວາມແມ່ນຍໍາສູງແລະອັດສະລິຍະ. ການຄວບຄຸມ EtherCAT ແມ່ນ redefining ເພດານປະສິດທິພາບຂອງການຕັດ laser ຜ່ານສີ່ຂໍ້ໄດ້ປຽບຂອງ synchronization ຄວາມແມ່ນຍໍາສູງ, ສາຍໄຟຕ້ານການແຊກແຊງ, ການກວດສອບໃນເວລາທີ່ແທ້ຈິງແລະການຜະລິດທີ່ມີຄວາມຍືດຫຍຸ່ນ!
ຕິດຕໍ່ພົວພັນຕ່າງປະເທດ:
ໂທ: +86-755-36995521
Whatsapp:+86-18938915365
ອີເມລ:nick.li@shenyan-cnc.com
ທີ່ຢູ່ລາຍລະອຽດ:
ທີ່ຢູ່: ຕຶກ 4, Xinqiao Chuanggu, ເລກທີ 45, ຖະໜົນອຸດສາຫະກຳ Hongxiang, Xinqiao, ເມືອງ Bao'an, ເມືອງ Shenzhen, ແຂວງ Guangdong, 518104, P.R.China












